über den Batterien die Schaltung für die Infrarot-Kollisionsdetektoren; an den vorderen Extremitäten links und rechts die Sender, in der Mitte der Empfänger. Es wird moduliertes IR verwendet.
|
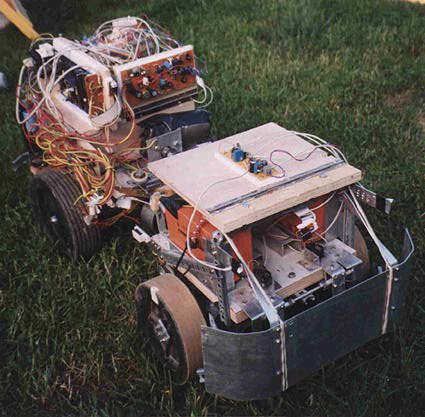
| My first robot. I decided to build a robot for outdoor use, thinking it would me more interesting than an indoor model. Built mostly with recycling parts. Driven by 2 car wiper motors on about 17 Volts. Direction change by a third wiper motor in the middle to change the angle of the two halves of the chassis; it works with a steel rope that is wrapped around the motors shaft, can just be activated while driving because of self-destruction risks. The wheels are from a lawn mower. The rear wheels were fixed on a tilteable axe and fixed on spring resorts. Power supply by two 12V lead rechargeables batteries in series (7 Ah each). A main PWM-circuit stabilizes the motor voltage two around 17 Volts. Controlled by an 8052AH-BASIC-Evaluation board from Elektor magazine. Most other circuits self developed and built, 2 kits assembled. Can receive commands by a TV IR-remote control, an RC5-code receiver is used. No ADC-converter used. 2 Bumpers with microswitches on the front end, two on the rear and two in the middle for the direction motor. A belt-driven potentiometer with comparator circuit to detect the middle (straight on) position of the direction motor. 2 IR-Diodes on the front an one IR-modulated receiver (38 kHz). Ultrasonic obstacle detection on the rear. It got some obstacle detecting and avoiding routines, but had lots of problems with his own weight. The remote control was quite unuseable when the sun was shining. |
|
Ansicht vorne rechts über den Batterien die Schaltung für die Infrarot-Kollisionsdetektoren; an den vorderen Extremitäten links und rechts die Sender, in der Mitte der Empfänger. Es wird moduliertes IR verwendet. |
|
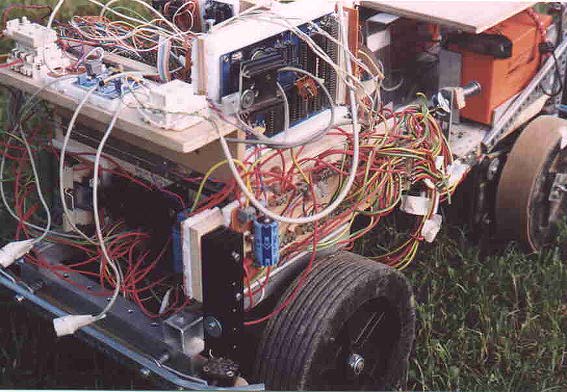
Ansicht hinten rechts
Die blaü Platine ist das Compuboard aus Elektor, auf Basis des 8052AH-Basic-Microcontrollers. |
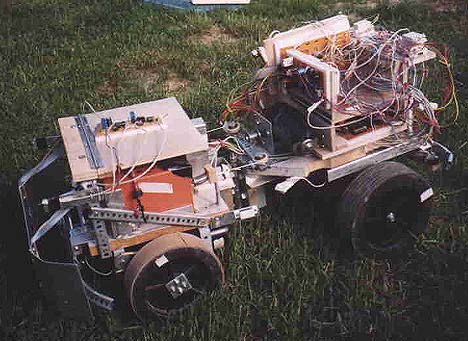
| Ansicht vorne links
Angetrieben auf beiden vorderen Rädern durch 2 Scheibenwischermotoren aus Pkw. |
|
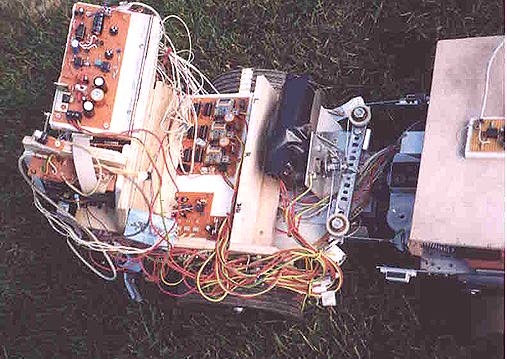
Ansicht von oben, hintere Hälfte
Hinteres Abteil aufgeklappt. Links im Bild die Erzeugung diverser Bordspannungen, die PWM-Regelung der Motor-Spannung, die Generierung der um 10 Volt höheren Ansteürspannung für den MOSFET. |

|
Prüfstand des Roboters
Ein Ständer auf Rollen; mit seiner Hilfe können die Antriebsmotoren sowie die Lenkung in natura gestestet werden, ohne den Host-Rechner abklemmen zu müssen. |
Die Maschine ist erst vor kurzem "im Gelände" getestet worden. Diese Tests wurden durch viele kleine Änderungen, Verbesserungen an Elektronik, Programm und vor allem Mechanik unterbrochen.
Der Roboter versucht aktuell einfachste Ausweichmanöver zu detektieren und zurückzusetzen resp. zu umfahren, womit er sich noch schwer tut.
Als nächstes müssen unbedingt in die beiden Hinterräder Lochscheiben mit Lichtschranken eingebaut werden, zur Wegmessung, zur Geradeausfahrt und vor allem, um nach Hindernissen wieder auf den rechten Weg zu finden.
Ich werde wohl auch noch ein LCD-Display installieren.
Die Lenkung ist nicht schlecht, der Wendekreis leider riesig, umfangreiche Verriegelungen müssen verhindern, dass die Lenkung aktiviert werden kann, wenn er nicht rollt; der Wischermotor der Lenkung hat schon manche Teile übel zugerichtet: sehr starker Motor.
Ich hatte diese Lenkung gewählt, aufgrund der Bodenverhältnisse draussen, wegen der Grösse des Roboters und wegen des recht hohen Gewichtes.
Die PWM-Regelung ist für 3 Motoren mit je 3 bit realisiert, R2R-Netzwerk mit einzelnen Komparatoren und gemeinsamem Dreieck-Oszillator; d.h. stop und 7 Geschwindigkeiten.
Im Moment werden im Kommandos ausschliesslich über eine RC5-TV-Fernbedienung übermittelt, der Empfänger war mal in Elektor. Eine 433 MHz-Fernbedienung scheint in Zukunft interessanter zu sein, zumals das IR im Moment auch schon mal die Kollisionsdetektoren irritieren kann, komisch ?!
Der Rechner ist das Elektor Compuboard mit 8052AH-BASIC; im Moment schnell genug.
Die vorderen IR-Detektoren müssen stärker = weiter strahlen können als bisher.
Die Ultraschalldetektoren hinten sind ein CONRAD-Restposten-Bausatz.
Es gibt noch viel zu tun, aber im Moment macht das Roboterprojekt eine Pause...
Anfang 1999
Bis Anfang April wurde eifrig am Excalibur gearbeitet, dann war der Roboter wieder an der Reihe.
Einige der eben genannten Punkte wurden verbessert, ersetzt, erneuert, umprogrammiert.
So wurde die Schaltung der IR-Sendedioden teilweise ersetzt, um die LEDs mit deutlich höheren Strömen betreiben zu können. Die Ultraschallwandler wurden anständig (und gepolstert) am hinteren Ende montiert. An beiden Hinterrädern wurden an der Innenseite Lochscheiben angebracht, welche mit gebrauchten Gabel-Lichtschranken aus einem ausgeschlachteten Kopierer gelesen werden. Sie arbeiten im Infrarot und werden über eine simple Schmitt-Trigger-Impulsaufbereitung zu 2 Anzeige-LEDs und 2 Counter-Inputs am 8052 geführt.
Die entsprechenden Register am Controller wurden ausgewählt und die passenden Werte für die neuen Betriebsmodi im Programm eingesetzt. Ein Haken bei der Sache: T0 dient als Echtzeituhr, er wurde so beibehalten.
T1 dient zur Ansteuerung eines seriellen Druckers, kann entfallen.
T2 dient der seriellen Kommunikation mit dem ATARI-Hostrechner; sobald umprogrammiert, ist die Verbindung zum Host (natürlich) im Eimer, sehr unpraktisch...
Es wurde ein kleiner Schrank so umgebaut, dass er als neür Prüfstand dient, inklusive ATARI in Schublade, Schirm on Board, und auch das Ladegerät.
Ein Problem macht auch die Stromversorgung: Eine Messung auf dem Prüfstand ergab, beim gemeinsamen Betrieb aller 3 Motoren (im Leerlauf), liegt der Stromverbrauch am unteren Akku (Reihenschaltung mit Abgriff) bei 5,5 A, am oberen bei 4,5 A, Donnerwetter!!
Desweiteren wurde eine 20 W-Autobirne an der Vorderseite angebracht, damit das Fahren bei Dämmerung einfacher wird (beim Betrieb an der Fernbedienung). Die Birne ist über einen Befehl schaltbar.
Es wurden umfangreiche Änderungen an der Schalterroutine gemacht. Sie befasst sich mit der Auswertung der Endschalter an Lenkung und Stosstangen. Es waren einige Ungereimtheiten zu entfernen, die die Kollisions-Prozeduren wohl am Prüfstand funktionieren liessen, nicht aber korrekt im Gelände.
Beim Umfahren von Hindernissen gibt es auch zu bemängeln, dass die Routinen doch irgendwie schwerfällig ablaufen, der Wendekreis doch sehr gross ist, und die Schnelligkeit zum Wenden sehr behäbig ist.
Ich habe in Erwägung gezogen, grundlegende änderungen am Fahrwerk vorzunehmen; überlegungen gingen von Kfz-ähnlicher Lenkung über Raupenantrieb bis zu Allradantrieb (je Seite 1 Motor, Räder über Ketten gekoppelt). Wahrscheinlich wäre es besser, ein solches Gländefahrzeug eher mit einer Panzer- oder Bagger-ähnlichen Richtungssteürung auszustatten.
Mai 1999

|
1999 Wurde nicht weiter am Roboter gearbeitet, der Synthesizer und das Haus standen höher auf der Prioritätenliste. Ein Antriebsrad hat sich mittlerweile gelöst; die Last der Motoren und der Akkus auf den Achsen der Wischermotoren war doch zu hoch. Das Stahlseil für die Lenkung ist wieder mal abgesprungen... Sowieso hat sich diese Seilzuglenkung als nicht effizient genug erwiesen, auch in Sachen Schnelligkeit. Ich habe über Zahnstangen und Fahrradketten nachgedacht, doch ist das alles nicht so evident. Wie einfach hat man es doch, wenn das Gerät nur im Wohnzimmer oder einer Lagerhalle zu fahren hat.... Ich habe eben stärkere Akkus (und viel schwerere!) ergattert, und spiele ernsthaft mit dem Gedanken, den Robotern mit selbstgefertigten Raupen auszustatten, so wie ein Panzer oder Caterpillar. Bis das angegriffen wird, werden die Jahreszeiten wohl noch das eine oder andere Mal wechseln. Januar 2000 |
Literatur zum Thema:
Mobile Roboter
Joseph L. Jones / Anita M. Flynn
ISBN 3-89319-855-5
DM 69,90
sehr empfehlenswert, eine echte Bibel
back to Robots Page | back to Main Page |
|---|
|
Contact Page Editor last update: June 4th 2004 | 
| 
|