|
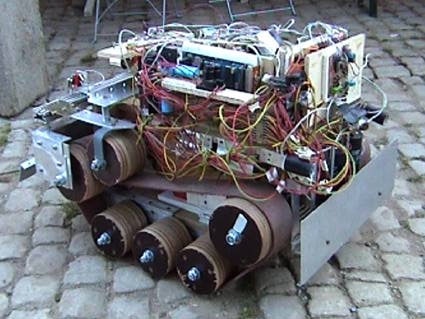
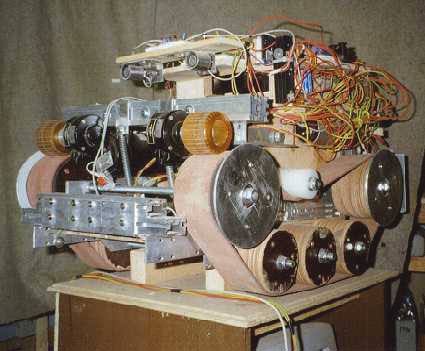
| Two tank-like tracks made of rubber should ensure the movement of this heavy outdoor robot. The rubber was fixed with a kind of super-glue to a loop: instant drying and extremely solid joint. There was a big problem with the tracks who permanently went off the transport wheels. This was compensated by giving a slight convex shape to the corner wheels. The whole electronics where taken from the first robot, and the batteries have been replaced by two larger units of 25 Ah each. Two infrared pulsed diodes and one IR-receiver on the front side, Ultrasonic on the rear, 2 x 2 bumper microswitches on each corner. Processor again Elektor dev-board with 8052AH-BASIC. Serial programming via cable from Atari ST. The small wheels where made from a Betonplex-wood-sandwich. Power supply with two 12V-batteries in series with a MOSFET-PWM-regulation circuit. Each track motor was driven by its own MOSFET-PWM-circuit with 8 stages (halt and 7 speeds). The motor inversion was made with relays that had to be commutated only in the stop mode to avoid contact sparks and current peaks. The machine was so heavy that it was a hard work for two persons to pick it up and bring it into the house again. The two car wiper motors were definitely not strong enough to move this monster, so i switched to two second-hand wheel chair motors. Severe problems again with the two rubber tracks that didn't want to stay on the weels especially when making a curve; i added aluminum disks on the border of the main wheels to prevent this phenomenon. This project has been abandoned some day when i saw that it couldn't really work with the tracks and the enormous weight of the robot. |
|
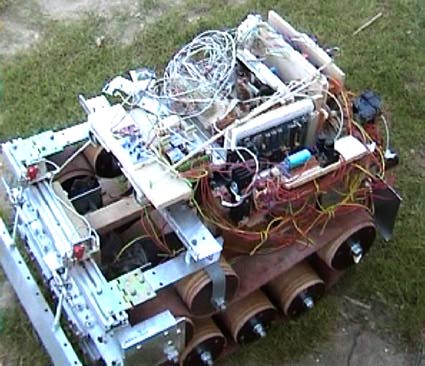
Mittlerweile sind erste Testfahrten mit dem neuen Roboter gefahren worden. Er besitzt einen Raupenantrieb. Sein Gewicht ist salopp gesagt: sauschwer! Unmöglich ihn alleine aufzuheben; sogar zu zweit kein Vergnügen! Die gesamte Elektronik wurde rüberverlegt, nur sehr wenige Kabel mussten verlängert werden. Es funktioniert nicht schlecht, nur gibt es ernste Probleme mit dem Schlupf der Antriebsraupen beim Rückwärtsfahren. |
Juli 2000
|
Das Problem mit dem Schlupf scheint schwer lösbar. Selbst nach dem Überziehen der Antriebsräder mit Gummi dreht der Riemen oft durch, speziell beim Rückwärtsfahren und Hindernis-Ausweichen. Die beiden Motoren schwitzen wie die Tiere, kann man wahrlich behaupten... Mehrmals schon die Hauptsicherung durchgebrannt. Selbst winzige Steigungen werden zur Tortur. Beim Wenden während des Rückwärtsfahrens haben die Riemen die Tendenz, doch stark aus der Mitte der Räder wegzudriften.
| 
|
|
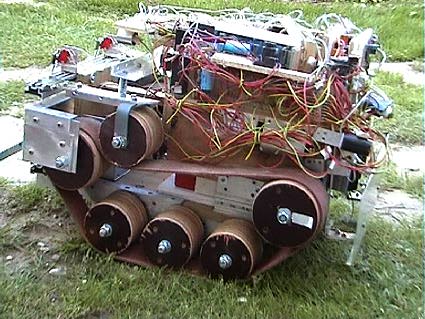
Rückansicht des Roboters auf dem Prüfstand
Anstelle der Scheibenwischermotoren wurden nun 2 Motoren aus einem ausrangierten Elektro-Rollstuhl eingebaut. Diese treiben die Räder nicht mehr direkt, aus Platzgründen und wegen einer damit einfach realisierbaren Untersetzung liegen die Antriebsräder der Motoren (eine Art Skateboard-Räder) aussen auf der Raupe auf.
|
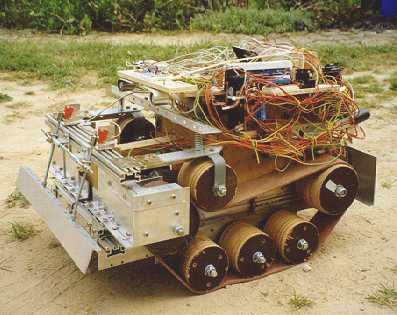
Ich habe nun beschlossen, eine andere Variante zu bauen: Allradantrieb mit Allradlenkung, Steuerung ähnlich wie beim Skateboard.
Wahrscheinlich die beste Lösung für unebenes und ungleichmässiges Gelände. Wahrscheinlich deutlich kräftiger, der Stromverbrauch wird wohl nicht übermässig steigen, weil die Raupenvariante sicherlich einen maximalen Strom durch die Wischermotoren zog.
August 2000
Der Roboter wurde komplett zerlegt.
Folgendes Bild zeigt seine gesamte Elektrik und Elektronik.

back to Robots Page | back to Main Page |
|---|
|
Contact Page Editor last update: June 4th 2004 | 
| 
|
