|
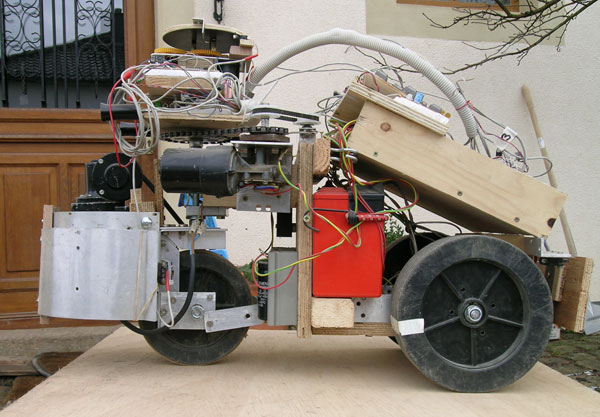
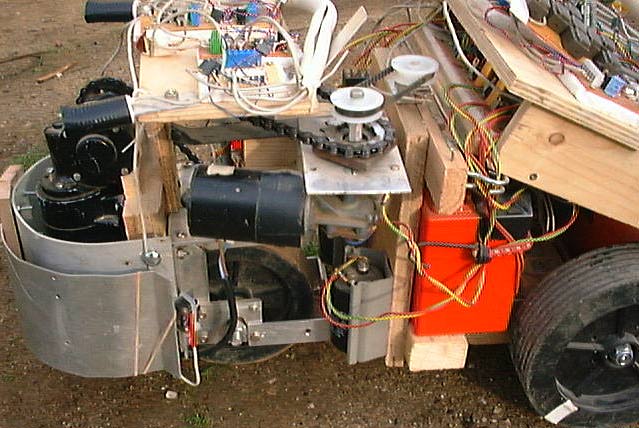
This robots is rolling much faster than previous models, but another problem appears: the wheel chair motor is driving the front wheel via a bicycle chain with not too well-centered wheels; the chain is often jumping off the wheel. After that i decided to use standard motor belts like in automobile motors.
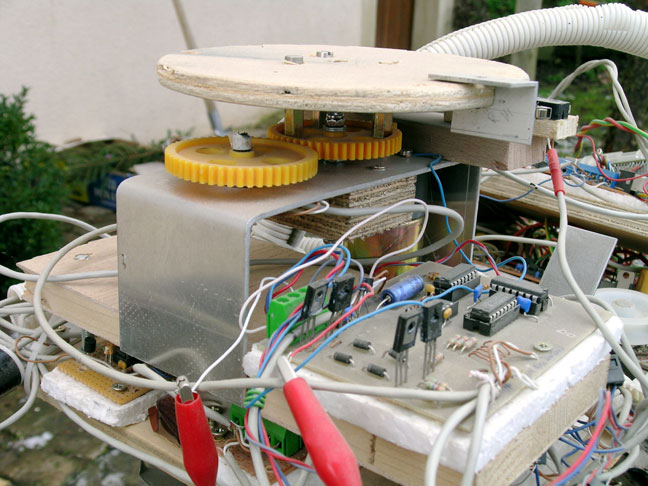
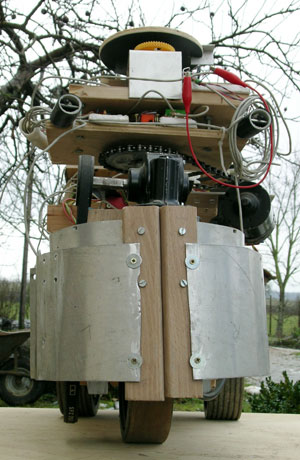
Next step is to set a "tower" with detectors on the top of the robot, a small platform with more analogues sensors on it, the platform makes a scanning movement from left to right and back, it scans about 300 degrees of a circle. The sensors to be mounted are two microphones, two LDRs an infrared receiver and two high brightness white LEDs to light the robot's path and environment.
The platform is driven by a DC motor with a gearbox, a potentiometer and two switches detect the ends of scanning range to inverse the scan direction, and to get the precise position (angle) of the scanning sensors. This should allow the processor to calculate the way to the detected signal source and drive in that direction.
|
|