
it works...
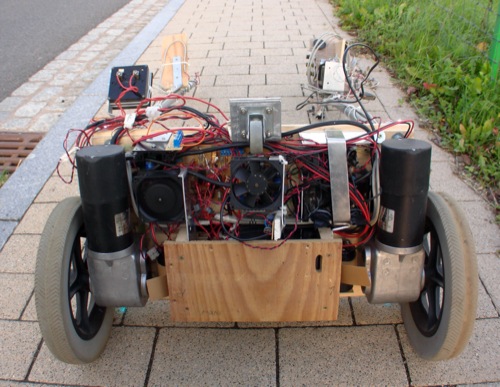
2 electric wheel chair motors with 24 V. The left fan cooles the motor drivers. The right fan had to be added after increasing the battery supply voltages. There are 3 Thomson Speedtouch AC-supplies with 3 independent 12 V charging circuits. You only need an ordinary 230 V AC plug to reload the scooter.
On the left side is the fan who hides the motor driver cards. On the right side the three independent battery chargers, as well as the main relais, fuses and filters (early picture).
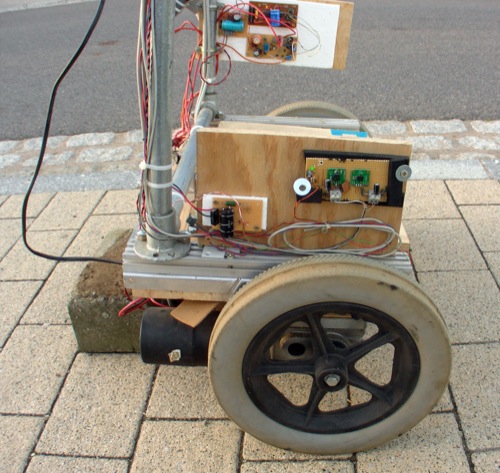
The two green boards are the accelerometer (Freescale MMA7260Q) and the gyroscope (ST LISY300AL) chips. The left board generates the 3,3 V supply for these sensors.
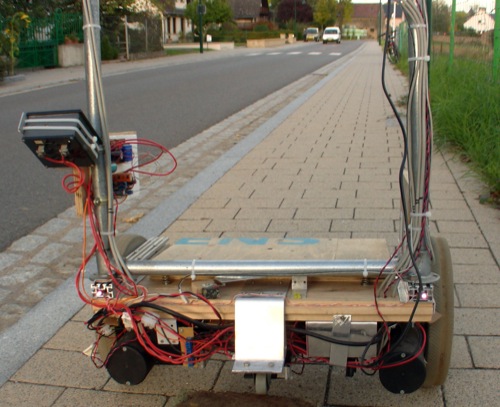
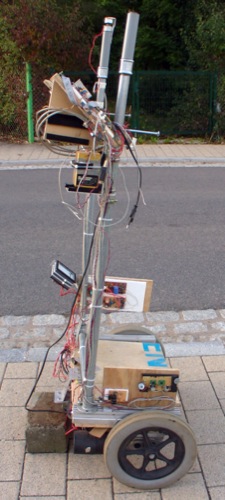
A big vintage Amperemeter on the left, to measure the motors current and gives a little Steampunk taste. The wheel in the middle protects the motors when the driver has been ejected from the scooter. A real advantage to the original Segway is to be able to jump off forwards.
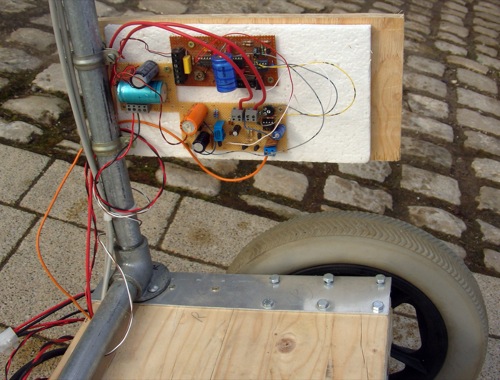
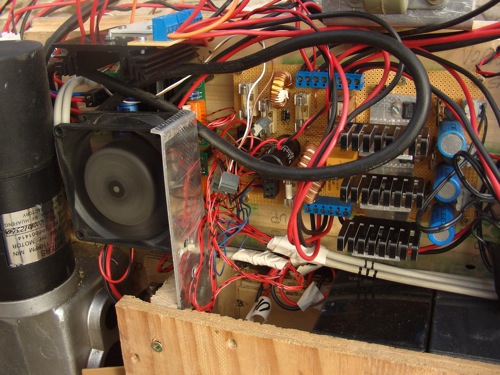
Power regulator to limit the motors voltage to a maximum of 30 Volts (to protect the motor drivers VNH3SP30-E H-Bridge from ST) when powered with 3 batteries of 12 V each. But it is still not working...
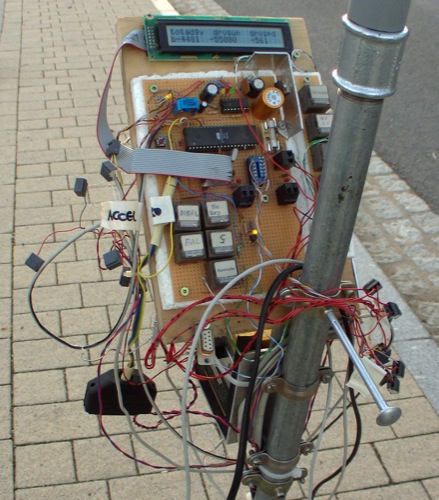
On the left handbar are the modified circuits of the previous Equilibot balancing robot. Most of the parts are recycled from telephones, faxes etc. The main processor is an Atmel AVR90S8535 clocked with 4 MHz, programmed in AVR BASIC with BASCOM compiler.
A first test without balancing circuitry, just to ensure the motors are strong enough and to get the feeling of the maximum speed
As you might see, the machine is working now. There are still some bugs and missing features. There have been many changes in hard, soft an electrical. I got the best behaviour by adopting the software from the Elektor project called Wheelie. More Details on www.elektor.de/Wheelie

excerpt from videoclip on RTL TV

Later on i changed the wheels to airtube tyres (Schubkarren). They are softer on difficult grounds and have a slight larger size. The behaviour of the engine is definitely smoother then before.

Videoclip: Riding my Scooter with big tyres and improved software

