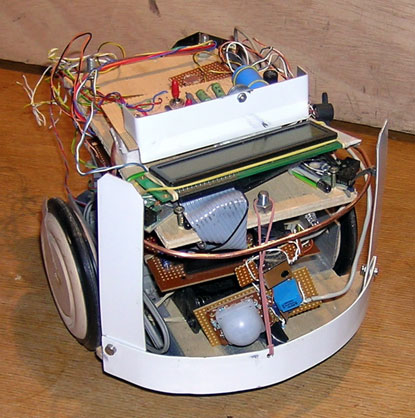
| Kleiner Indoor-Robot mit im dem Controllerboard aus den Knexbot-Varianten, aufgebaut Anfang 2004. Ein Atmel AVR 90S8535 mit 8 analogen Eingängen wacht über den Roboter. Programmierung über Sample-Electronics-Printer-Schnittstelle.
Batterien: 8 x NiMH-Mignon-Zellen, Ladeschaltung on board, kann mit fast beliebigem Steckernetzteil geladen werden.
2 Conrad-Getriebemotoren mit 1:125. Motoransteuerung mit L293B-Controller, PWM gemeinsam, Richtungsänderungen durch Anhalten resp. Umpolen eines Motors.
Sensoren: 2 IR-Dioden mit 36kHz-Empfänger, PIR-Detektor, Electret-Mikrofon, 2 x LDR, Linetracker wird folgen. Kollisionserkennung mit 2 Mikroschaltern über Spannungsteiler an analogem Port. 5 Tasten zur Auswahl verschiedener Modi resp. LCD-Ausgaben.
Ausgabe: LCD 16x2, Piezo-Buzzer, 4 LEDs, 2 superhelle weisse LEDs als Fahrlicht.
|
|
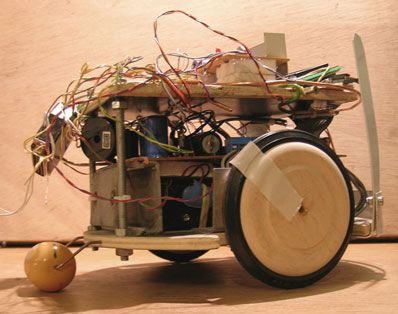
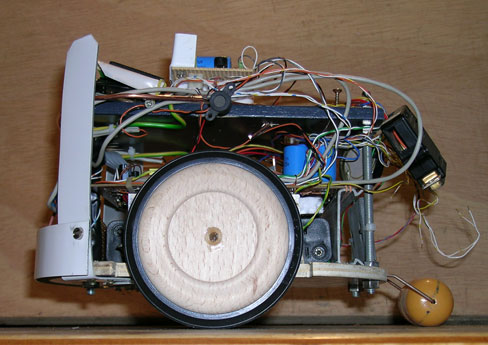
Die hölzernen Räder stamen von Hornbach. Sie sind mit 2-Komponentenkleber direkt auf die Getriebewelle geklebt, allerhand stabil. Sehr empfehlenswert ist das hintere passive Rad, welches aus einem Kinder-Überraschung-Ei stammt.
| 
|
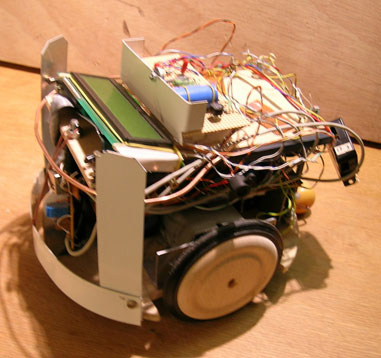
| Fahrtmässig wird ein sogenannter Parcours abgearbeitet, d.h. eine Liste mit sequentiellen Prozeduren oder tasks. Nach einer gewissen Zahl von Zeiteinheiten wird der nächste Schritt ausgeführt, z.b. eine Kurve (Dauer der Kurvenfahrt einstellbar), stoppen, bis der PIR-Detektor eine Person erfasst, etc. Bei zu lautem Geräusch dreht sich der Roboter mehrmals um die eigene Achse und dudelt eine schräge Melodie. Wenn die umgebung zu dunkel wird (Fahrt unter einem Stuhl), schaltet er seine weissen LEDs ein, die bemerkenswert gut leuchten.
| 
|
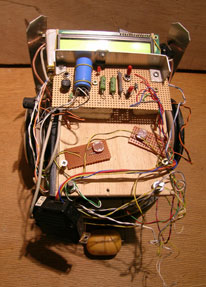
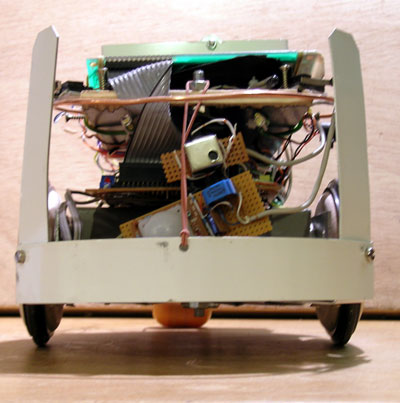
Gut sichtbar, die eher provisorischen LDRs, die Laderegler-Schaltung aus der Zeitschrift "micros et robots". und etliche Drähte, die noch mit irgendwelchen Sensoren oder Aktoren verbunden werden sollen...
| 
|
Un petit robot à deux roues motorisées et une roue arrière passive. Son cerveau est un micro-contrôleur Atmel AVR 90S8535 avec une extension de ports 8255 (3 x 8 entrées ou sorties supplémentaires).
Il poursuit une sorte de parcours: avancer, tourner d'un côté, s'arrêter, accélérer. Ce dit parcours est redémarré à chaque fois qu'il détecte un obstacle et qu'il heurte ou bien évite et contourne. S’il y a trop de bruit, le robot commence à tourner en cercle en chantant une mélodie bizarre. Si son entourage devient trop sombre il allume les phares.
Programmation : en BASIC à partir d'un PC relié par câble imprimante.
Détecteurs : Il possède un micro, un récepteur IR, un détecteur IR passif (PIR), quelques touches, deux détecteurs de lumière (LDR), un contrôleur de moteurs (L293). Des collisions sont détectées à l'aide de 2 microswitch à l'avant.
Sorties : LCD 16x2, Piezo-Buzzer, 4 LEDs, 2 LEDs très brillantes blanches utilisés comme phares, 2 moteurs Conrad (1:125)
Alimentation en courant : Il est alimenté par 8 piles rechargeables NiMH. Le circuit de recharge est inclus sur le robot.
|

