Ein Roboter, der auf 3 Rädern fährt, aber auch auf den beiden grossen balancieren soll. Falls alles klappt, soll die gesamte Einheit in eine herkömmliche Mülltonne eingebaut werden, welche selbstständig umherfährt, und dann auch noch auf den beiden Haupträdern balancieren kann.
Garantiert zweckfrei und Quatsch, aber trotzdem eine grosse Herausforderung, sowohl von Mechanik, Sensorik, PID-Regelung, etc.
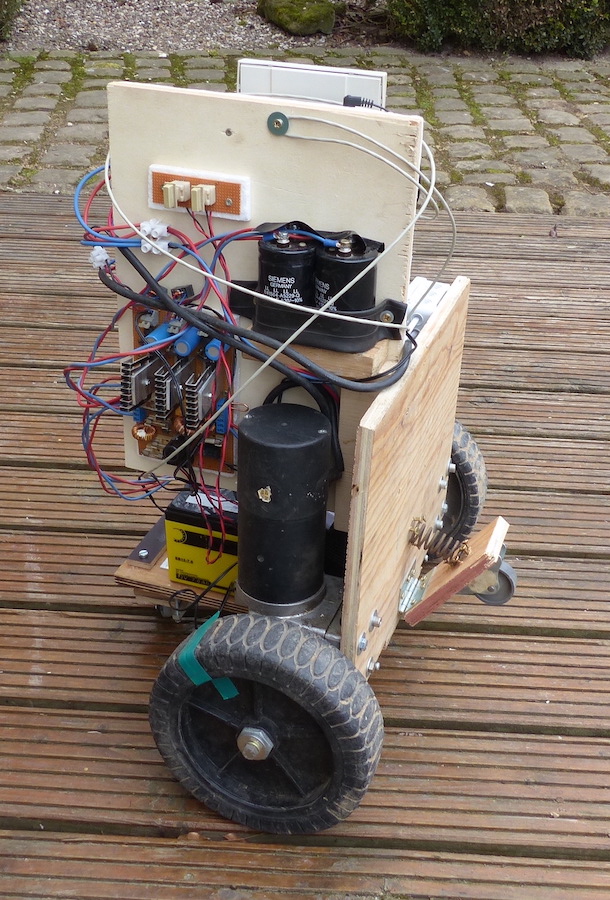
Die Fotos sind nicht ganz aktuell
2 x Rollstuhlmotoren 24 V DC
Räder von Rasenmäher
2 x Bleigel-Akkus inklusive Ladeschaltungen
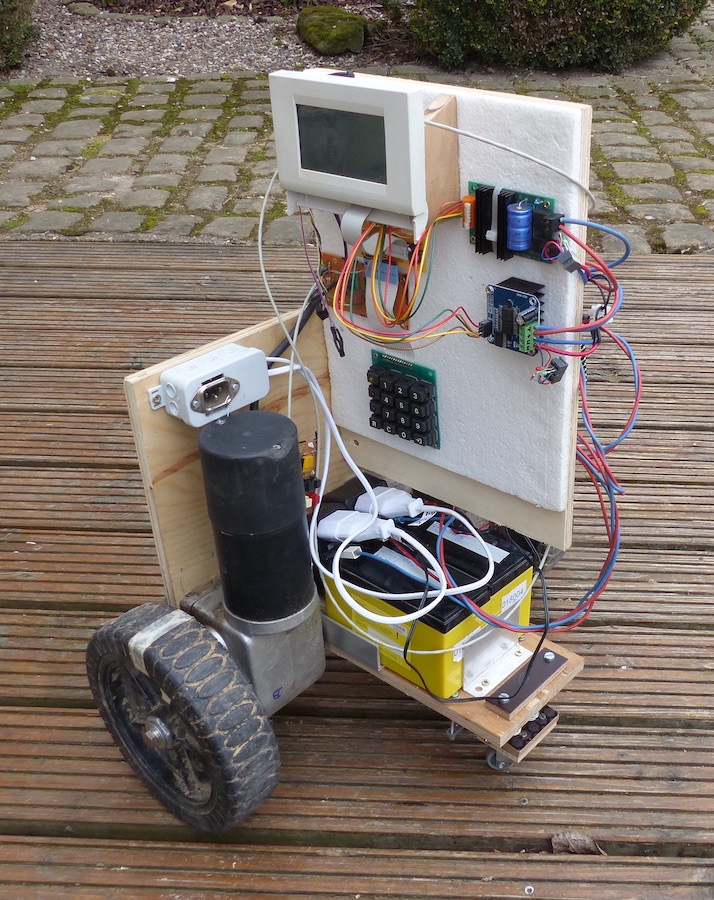
Arduino Mega2560
MEMS-Accelerometer und -Gyroskop
Display von Octophon 28 Telefon
Digitales Keypad auf Chassis, analoges Keypad mit Kabel-Fernbedienung
Programmiert mit BASCOM-BASIC
Erste PID-Regelung auf Basis von Elektor Wheelie

