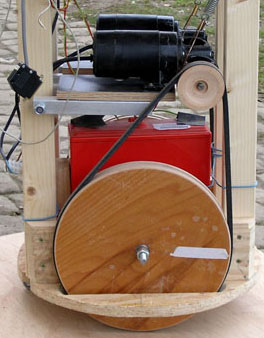
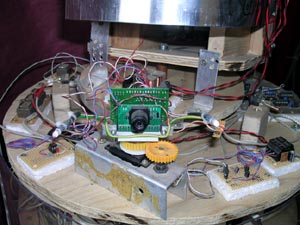
Linetracker auf der Unterseite: 2 weisse LEDs und 2 Fototransistoren, über Kollektorwiderstände auf 2 Analogports des AVR geschaltet.
Anfangs eingebaute LDRs erwiesen sich als ziemlich ungeeignet und wurden rasch ersetzt. Die Justierung der desamten Optik ist eine sehr knifflige Angelegenheit.
Es wurde sofort klar, dass eine dritte Kurvenvariante gebraucht wurde. Also wurde mit einem weiteren internen Timer des AVR eine zweite, unabhängige PWM-Steuerung realisiert.
Die 2 Paare LED-Transistor sind normalerweise beide auf einer breiten hellen Linie (Anstrich-Abklebeband), beim Abdriften ist (meistens...) immer noch eines der beiden Optiken auf der Linie und der Roboter korrigiert seine Richtung, indem er die Drehzahl des entsprechenden Motors herabsetzt, bis wieder beide Optiken die Linie erkannt haben.

| 
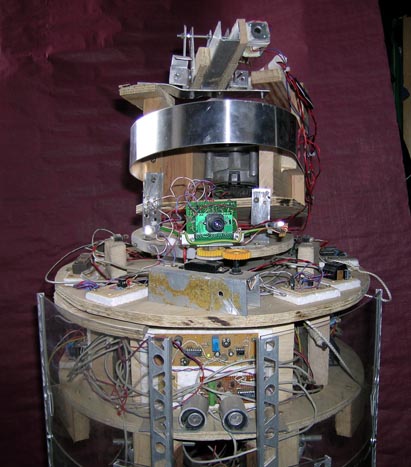
Erster öffentlicher Auftritt anlässlich eines Hobbymarkts in Roodt/Syre (16. Mai 2004). Die Sporthalle war bestens geeignet für längere Fahrten. Die IR-Sensoren funktionierten besser als erwartet (Stühle, Tische, Besucher). Es zeigten sich aber Programm-Unreinheiten, z.B. wenn der Roboter in einer Sackgasse gelandet war.
|